ELASTIC SENSING ELEMENTS
Disusun untuk melengkapi tugas Sistem Kalibrasi dan Kontrol
Oleh kelompok VI
KELAS B
ANUGRAH ASWIN ADI S. 2408100062
LUSTYYAH ULFA 2408100064
SUNARTO 2408100066
FISTA RACHMA D. 2408100068
SOFYAN ADE PRATAMA 2408100070
SARWENING TRYAS A. 2408100072
JURUSAN TEKNIK FISIKA
FAKULTAS TEKNOLOGI INDUSTRI
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
BAB I
PENDAHULUAN
Latar Belakang
Beberapa material untuk sensing element suatu sensor mekanis terus dikembangkan.Salah satu contohnya adalah elemen elastis seperti alat baja, stainless steel, aluminium atau tembaga berilium sebagai bahan utama sensor untuk pengukuran beban, tegangan, regangan ataupun deformasi dari suatu struktur. Khusus dalam bidang Mechanical Engineering, Structural Engineering, dan Sport Engineering kebutuhan akan sensor yang relatif ringan serta mudah dalam penggunaannya terus berkembang. Kebutuhan akan sensor yang fleksibel juga sangat meningkat khususnya di bidang Human Engineering, Welfare Engineering serta Medical Engineering. Karena Sensor dan transduser merupakan peralatan atau komponen yang mempunyai peranan penting dalam sebuah sistem pengaturan otomatis. Ketepatan dan kesesuaian dalam memilih sebuah sensor akan sangat menentukan kinerja dari sistem pengaturan secara otomatis.
Adapun salah satu bentuk aplikasi elemen sensing elements yaitu merancang bangun load cell sebagai sensor gaya pada system uji. Penggunaan aplikasi ini disebabkan oleh kebutuhan sensor pada sistem uji akan terus meningkat dan semakin rumit sejalan dengan kemajuan teknologi pengujian dan semakin bertambahnya jenis uji yang dibutuhkan industri. Load cell adalah sebuah transducer gaya yang bekerja berdasarkan prinsip deformasi sebuah material akibat adanya tegangan mekanis yang bekerja untuk menentukan tegangan mekanis didasarkan pada hasil penemuan Robert Hooke, bahwa hubungan antara tegangan mekanis dan deformasi yang diakibatkan disebut regangan. Metode yang digunakan dengan menempelkan strain gauge pada load cell.
1.2 Tujuan
Memahami definisi dari elastic sensing elements
Mengetahui model dinamik sistem elastic sensing elements
Mengenal dan memahami aplikasi dari sensor induktif
Permasalahan
Apa pengertian dari elastic sensing elements?
Apa saja model dinamik dari elastic sensing elements?
Apa saja dan bagaimana aplikasi yang menggunakan sensor induktif ?
BAB II
DASAR TEORI
KARAKTERISTIK ELASTIC SENSING ELEMENTS
Elastic Sensing Elements
Penginderaan elastis unsur-unsur yang mengubah tekanan ke perpindahan jarak (x), dan yang dirancang untuk digunakan dalam alat pengukur tekanan, dan alat pengukur tekanan vakum. Sensor elastik ini biasanya digunakan untuk mengukur torsi, tekanan, dan percepatan, dimana berkaitan dengan gaya. Secara matematis dapat dituliskan sebagai persamaan berikut:
τ=F x s
P= F/A
a= F/m
Dalam sistem pengukuran yang menggunakan elastic element, akan diikuti dengan pergeseran sensor untuk kedua kalinya, seperti: potensiometer, strain gauge, LVDT, yang dimana mengubah regangan menjadi sinyal elektrik. Pergeseran tersebut dapat terjadi baik secara translasi maupun rotasi.
Elastic sensing elements menghubungkan massa dan redaman sebagaimana karakeristik pegas. Berikut karakteristik dari elemen penginderaan elastis ditentukan berdasarkan:
Nominal Perpindahan, Nilai perpindahan dari titik acuan, karena efek tekanan nominal.
Non-linearitas karakteristik elastis, Perbedaan antara karakteristik elastis ke depan dan karakteristik linier konvensional.
Histeresis, Perbedaan antara nilai-nilai perpindahan dari titik acuan nilai untuk suatu tekanan, diperoleh untuk menurunkan dan meningkatkan tekanan.
Sensitivitas, Quotient dari peningkatan nilai perpindahan dari titik acuan dan peningkatan tekanan yang sesuai.
Perubahan posisi awal, Pemindahan dari posisi awal setelah elastis unsur penginderaan telah diserahkan kepada tekanan nominal, untuk tekanan overload, atau tekanan lain selama jangka waktu tertentu.
Stabilitas karakteristik elastis. Bakat dari elemen penginderaan elastis untuk mempertahankan karakteristik elastis konstan. Bentuk elemen elastis yang digunakan dalam sel beban tergantung pada sejumlah faktor termasuk berbagai kekuatan yang harus diukur, batas-batas dimensi, kinerja akhir dan biaya produksi.
Elastic sensing element memiliki keterkaitan dengan massa (inertance) dan redaman (resistensi) sebagaimana karakteristik pada suatu pegas. Jika sistem dinamika massa-pegas-gaya damper dianalisis, maka dapat ditampilkan sebagai fungsi transfer orde dua
Bahan yang digunakan untuk elemen elastis biasanya alat baja, stainless steel, aluminium atau tembaga berilium, tujuannya menjadi bahan yang menunjukkan hubungan linear antara tekanan (gaya yang diberikan) dan regangan (output) dengan histeresis dan rendah rendah merayap di jangkauan kerja. Ada juga harus tingkat tinggi antara gaya pengulangan siklus untuk memastikan bahwa beban sel adalah alat pengukur dapat diandalkan. Untuk mencapai itu karakteristik ini biasanya subjek material heat treatment khusus. Ini mungkin termasuk sub-nol siklus heat treatment untuk mencapai stabilitas maksimum.
Satuan Pengukuran
Unit pengukur tekanan adalah pascal , Pa. Ketika menerapkan Rekomendasi ini, kelipatan dari pascal, menurut aturan SI Sistem Internasional, berwenang, terutama kelipatan berikut: kPa, MPa dan GPa. Bar dan sub-kelipatan dan kelipatan, terutama mbar, berwenang sejauh mereka yang diakui oleh peraturan nasional, dan menunggu keputusan internasional pada penggunaan perpindahan linear dapat dinyatakan dalam milimeter, mm, perpindahan sudut dalam derajat.
Model Dinamik Elastic elements
Linear Accelometer
Sensor yang mendeteksi percepatan disebut accelerometers. Perangkat ini memanfaatkan instrumented pegas-massa "seismik" struktur yang dapat dipahami dengan menggunakan hukum Newton. Acclerometers mendeteksi gerakan suatu objek atau titik dalam ruang inersia. Catatan bahwa ini berbeda dari perpindahan-jenis sensor yang merasakan gerak relatif antara dua titik. Menariknya, perpindahan-jenis elemen sensing diperlukan accelerometers untuk memberikan suatu ukuran pemindahan atau kekuatan, yang kemudian dapat digunakan untuk menduga percepatan. Elemen dasar dari setiap accelerometer adalah massa seismik, m, dalam casing yang melekat pada objek test. Struktur elastis (misalnya, pegas) yang mendukung massa dan perpindahan unsur-sensing digunakan untuk menyimpulkan gaya yang dibutuhkan untuk memberikan massa seismik gerakan yang sama sebagai objek pengujian.
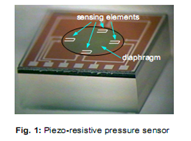
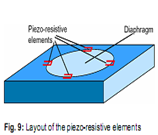
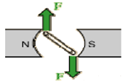
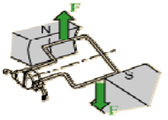
Pressure Sensor
Sebuah sensor tekanan, atau tekanan pemancar, digunakan untuk mengukur tekanan gas atau cairan. Mereka dirancang untuk memantau perubahan-perubahan dalam tekanan dan sering terhubung ke perangkat keselamatan yang mengaktifkan menutup-off switch. Sensor-sensor tekanan menggunakan pembacaan tekanan untuk mengirim pesan ke mekanisme lain. Sensor-sensor tekanan mampu memantau secara akurat tekanan cairan dan dapat menjadi alternatif murah mengalir sensor. Sensor-sensor tekanan digunakan dalam instrumen cuaca, pesawat terbang, dan mobil. Mereka juga memonitor mesin dalam berbagai jenis mesin. Ada lima jenis sensor tekanan: absolute, gauge, vakum, diferensial, dan disegel. Absolute sensor mengukur tekanan relatif terhadap O PSI, tekanan vakum sempurna. Gauge sensor, dalam perbandingan, dapat dikalibrasi untuk mengukur tekanan relatif terhadap tekanan atmosfer pada lokasi tertentu. Gauge sensor yang paling umum dari lima jenis sensor tekanan. Vacuum sensor digunakan untuk mengukur tekanan yang lebih kecil dari tekanan atmosfer setempat, sementara perbedaan sensor mengukur perbedaan antara dua atau lebih tekanan masukan di unit. Jenis terakhir sensor, disegel, adalah sama dengan gauge sensor, kecuali bahwa tekanan ukuran relatif terhadap tekanan di permukaan laut, 16,4 PSI.
Gambar Pressure sensor
Angular accelometer
Suatu alat yang mengukur laju perubahan kecepatan sudut antara dua objek di bawah pengamatan. pengukur kecepatan sudut digunakan terutama untuk mengimbangi kejutan dan getaran sudut dalam baca / tulis disk kepala majelis. Perangkat ini mirip dengan pengukur kecepatan linier dalam hal desain, fabrikasi, dan pembacaan yang dirancang dengan nol pendulosity (yaitu, pusat gravitasi terletak di pusat massa dukungan pegas), dan sesuai dengan gerak rotasi namun kaku dengan terhadap gerakan linier.
Rotary adalah pengukur kecepatan untuk mengukur komponen dengan berprinsip gerak rotasi. Alat ini serupa juga mempekerjakan suatu massa seismik instrumented memiliki momen inersia dan derajat kebebasan rotasi atau menggunakan dua polaritas yang berlawanan dengan jarak pengukur kecepatan linier terpisah di adiameter untuk mengukur komponen-komponen percepatan tangensial . Namun, ini sulit untuk benar-benar membangun karena komponen translasi sering dapat membuat komponen rotasi tomeasure sulit. Efek ini disebut sebagai cross-talk.Torque sensor.
Adapun gambar model dinamik dari elastic sensing elements untuk pengukuran percepatan linier, torsi, tekanan dan percepatan angular ditunjukkan sebagai berikut. Keempat model dinamiknya ditunjukkan dengan diferensial orde kedua dan sebagai fungsi transfers.
Gambar a.
Gambar di atas menunjukkan model dinamis untuk mengukur elemen-elemen elastis linier akselerasi, torsi, tekanan dan percepatan sudut. Dinamika dari semua empat unsur diwakili oleh orde kedua persamaan diferensial dan fungsi transfer. Sosok memberikan nilai-nilai kondisi mapan gain K, ωn frekuensi alami dan redaman ξ rasio untuk tiap jenis sensor. Persamaan diferensial untuk sensor torsi adalah analog dengan persamaan untuk gaya sensor; persamaan torsi melibatkan gerak rotasi sedangkan gaya melibatkan persamaan gerak translasi. Berikut sebuah input torsi T ditentang oleh pegas torsi cθ dan torsi redaman b2; yang dihasilkan tidak seimbang torsi adalah sama dengan produk momen inersia dan percepatan sudut saya 3. Di sensor tekanan, tekanan P input menghasilkan tenaga AP atas wilayah A dari bellow yang ditentang oleh bellow gaya pegas kx dan gaya redaman λ x.
Model konseptual accelerometer yang ditunjukkan pada Gambar a, adalah sebuah casing yang mengandung sebuah 'seismik' massa yang bergerak pada panduan gesekan rel melawan pegas. Jika casing diberi percepatan a, maka massa m mengalami gaya inersia ma dalam arah yang berlawanan. Ini adalah gaya yang sama ketika pengemudi mobil dilemparkan ke belakang terhadap kursinya sebagai akibat dari mobil yang dipercepat, atau terlempar ke depan selama pengereman mendadak. Gaya ini ditentang oleh gaya pegas kx, di mana x adalah perpindahan massa relatif terhadap casing. Di bawah kondisi tunak pada t = 0 - ini dua kekuatan
berada dalam kesetimbangan, jadi:
ma0-= kx0-
dalam keadaan steady state,
K=(x0-)/(a0-)= m/k=1/(x_n^2 )
Jika percepatan input tiba-tiba ditingkatkan menjadi pada waktu t = 0 -, maka kekuatan bekerja pada massa tidak lagi dalam keseimbangan dan massa bergerak relatif terhadap casing, yaitu percepatan kecepatan x dan y adalah non-nol. Resultan gaya yang tidak seimbang adalah ma - kx - λ x, memberikan:
ma - kx - λ x = mx
mx + λ x + kx = ma
dengan catatan bahwa percepatan x dari massa relatif berbeda dengan percepatan a.
Pada gambar b di bawah ini ditunjukkan empat penggunaan praktis elastic sensing element
Gambar b. Practical elastic sensing elements menggunakan strain gauge
cantilever load cell
Pillar load cell
Torque sensor
Unblonded strain gauge accelerometer
Pada Cantilever atau load cell, aplikasi gaya F menyebabkan cantilever tertekuk sehingga permukaan atas tegangan +e dan permukaan bawahnya sama dengan kompresi tegangan –e. Besarnya strain =
Dimana modulus Young untuk bahan cantilever dan komponen lainnya ditunjukkan pada gambar b.Strain gauge 1 dan 3 yang dapat diregangkan +e,sehingga resistan menjadi bertambah R. Gauge 2 dan 4 sebagai kompresi tegangan –e,menyebabkan resistansi berkurang.
Berdasar gambar b,batang silinder sebagai torsi sensing element.Aplikasi torsi yang dihasilkan sebagai suatu potogan tegangan ∅ yang terletak pada potongan dan hubungan tegangan serta kompresi tegangan pada permukaan tekukan. Gauge 1 dengan sudut 45o pada sumbu axis,dimana tarikan tegangan memilki nilai +e maksimum dan gauge 2 dengan sudut -45o pada sumbu axis dimana kompresi tegangan maksimum –e. Gauge 3 dan 4 memilki sudut yang sama pada sisi lain batang dan nilai tegangan +e dan –e. Tegangan maksimumnya:
Dimana s adalah modulus geser dan a adalah lebar batang.
Diagram sederhana accelerometer menggunakan empat tegangan tak terikat gauge seperti gambar b bagian d.Jarak antara massa seismic dan casing diisicairan untuk peredaman.Jika casing diberi percepatan a, lalu hasil perindahan massa seismic m relative adalah=
Dimana k adalah kekakuan dari strain gauge. Gauge 1 dan 3 mengalami pemendekan dari L sampai L-x. Tarikan tegangan pada gauge 1 dan 3 naik dari eo + e, dan gauge 2 dan 4 menurun dari e0- e.dimana:
Keempat gauge dihubungkan dengan jembatan wheatstone didapatkan:
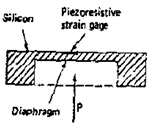
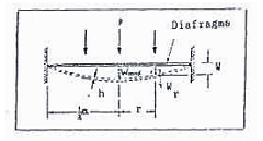
Pada gambar c,ditunjukkan elastic pressure elements. Pipa (7)-(9) berkarakteristik kekakuannya rendah dan frekuensi alaminya uga rendah tetapi sensitivitas perpindahan besar. Membran,diafragma dan tabung (1)-(5) adalah kekakuannya rendah dengan frekuensi alami yang tinggi tetapi rendah pada sensitivitas perpindahan.
Bentuk persamaan diafragma lingkaran datar,penjepitnya berada di dalam lingkaran, seperti gambar c bagian b.Terlhat adanya hubungan tekanan dan pusat defleksi yc dengan fubngsi non linier tetapi ketidaklinierannya dapat diminimalkan dengan perbandingan yc/t.
Jika ketidaklinierannya dibatasi maksimum 1 %,didapatkan:
APLIKASI PENGGUNAAN ELASTIC SENSING ELEMENT
Aplikasi dari penggunaan elastic sensing element adalah merancang bangun load cell sebagai sensor gaya pada system uji. Load cell adalah sebuah transducer gaya yang bekerja berdasarkan prinsip deformasi sebuah material akibat adanya tegangan mekanis yang bekerja, untuk menentukan tegangan mekanis didasarkan pada hubungan antara tegangan mekanis dan deformasi yang diakibatkan disebut regangan. Regangan ini terjadi pada lapisan kulit dari material sehingga untuk mengukurnya menggunakan sensor regangan atau strain gage. Di bawah ini adalah contoh gambar strain gauge satu sumbu.
Gambar strain gauge satu sumbu
RANCANG BANGUN LOAD CELL KAPASITAS 100 kN
Optimasi bentuk dan dimensi load cell dilakukan dengan memperhatikan dimensi ruang yang tersedia serta gaya atau beban yang akan bekerja. Untuk keperluan analisis tegangan dilakukan menggunakan simulasi metoda elemen hingga (finite element method). Beban yang diberikan pada model adalah beban kerja tekan sesuai dengan peruntukannya, sehingga dapat diketahui daerah paling besar terjadi konsentrasi tegangan serta beban maksimum yang masih diijinkan.
Penampang load cell untuk beban kerja tekan dihitung dengan persamaan:
σ = F/A
σ = εE
dimana
σ = Tegangan
ε = Regangan
E = Modulus Elastisitas
Jika kedua persamaan di atas disubstitusi maka akan mennjadi seperti berikut
F/A = εE A = F/εE
Penampang load cell dibuat berbentuk cincin dengan maksud selain untuk memperbesar permukaan load cell juga untuk memudahkan komponen lain terpasang dalam satu sumbu. Sedangkan lubang ulir M-8 digunakan untuk menghubungkan load cell dengan choosen plate agar load cell lebih fleksibel dipasang pada peralatan uji.
Dan dapat digambarkan seperti pada gambar di bawah ini.
Gambar load cell untuk beban tekan
Untuk membuat load cell agar sesaui yang diharapakan, maka material yang digunakan adalah sebagai berikut:
Material yang dipilih adalah ASSAB 760, yang memiliki karakteristik mekanik
material sebagai berikut:
Tensile Strength = 65–80 kg/mm2
Yield Point = 35–45 kg/mm2
Elasticity Modul = 210.103 N/mm2
Perhitungan penampang load cell untuk beban rencana 100 kN, dengan regangan
yang diharapkan (ε) = 0,1 %, dilakukan dengan memasukan harga F, ε dan E pada persamaan:
A = F/εE
Menjadi seperti berikut :
= 100000N/(210000N/mm2.0,001)
= 476,190mm2
Kemudian diameter load cell dapat dihitung dengan menggunakan persamaan:
A = π/4(D2 – d2)
Jika diameter lobang load cell (d) diambil 28 mm, maka diameter load cell (D), dapat diperoleh dengan memasukan harga A dan d kepersamaan:
D = A/(π/4)+d2
Maka diperoleh diameter load cell (D) = 37,290 mm.
Dari persamaan σ = F/A
diperoleh harga tegangan yang bekerja pada beban maksimum:
dengan A = π/4(D2 – d2)
sehingga σ =160,826N / mm2
sedangkan dari persamaan σ = εE
ε = σ/E x 106µ
ε = 765,383µ
PEMASANGAN STRAIN GAGE
Pada pembebanan murni seperti tekan, tarik, bending dan puntir dalam praktek jarang terjadi secara sendiri-sendiri, melainkan bekerja secara bersama-sama. Untuk kasus pembebanan kombinasi seperti ini diperlukan cara pemasangan strain gage dan pemilihan konfigurasi jembatan yang tepat. Selain itu pengaruh temperatur disekeliling juga harus diperhatikan. Perubahan temperatur akan menyebabkan load cell mengerut atau mengembang dan efeknya akan terlihat pada regangan yang terbaca pada alat ukur. Jika tidak dilakukan kompensasi regangan akibat perubahan temperatur, maka regangan akibat pembebanan tidak dapat dibedakan dari regangan akibat temperatur. Akibatnya hasil pengukuran tidak dapat dijamin keabsahannya. Untuk mengatasi hal tersebut pada penempelan strain gage ini dipakai konfigurasi jembatan penuh, yang dalam hal ini regangan akibat momen bending dan temperatur jika ada akan ikut terukur selain regangan akibat beban tekan ataupun tarik.
SENSITIVITAS LOAD CELL
Sensitivitas load cell terhadap gaya yang bekerja dapat dihitung dengan cara sebagai berikut:
Jika beban F diberikan maka regangan normal atau regangan longitudinal yang terjadi besarnya adalah:
F/A = εE
ε = F/AE
Sedang regangan transversal atau regangan lateral besarnya adalah:
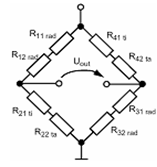
Perubahan regangan yang terjadi ini sebanding dengan perubahan tahanan pada strain gage, sehingga dapat diukur dengan jembatan wheatstone seperti berikut ini:
Jika pada node 2 & 3 dihubungkan dengan tegangan eksitasi Vs, maka pada node 1 & 4 akan timbul tegangan keluaran Vo. Perbandingan antara tegangan keluaran Vo dan tegangan eksitasi Vs, disebut sensitivitas load cell. Sedangkan harga Vo tergantung pada rasio R1 : R2 dan R3 : R4. Secara umum persamaannya adalah sebagai berikut:
Dalam keadaan setimbang:
Keadaan ini dicapai jika:
Maka :
Harga poison rasio (μ ) untuk baja adalah 0,30. Harga faktor gage (k ) untuk strain gage tipe FLA-6-11adalah 2,11.
Dengan demikian sensitivitas load cell adalah:
Artinya: Jika load cell diberi tegangan eksitasi (Vs) sebesar 1 Volt pada beban maksimum (10 ton), load cell akan mengeluarkan out put (Vo) sebesar 1,050 mV. Jika tegangan eksitasi (Vs) sebesar 5 Volt, maka out putnya sebesar 5,25 mV.
VERIFIKASI
Verifikasi dilakukan dengan cara mengukur besarnya regangan yang terjadi pada load cell ketika dibebani secara aktual, agar diketahui kesesuaian antara hasil perhitungan dalam perencanaan dengan hasil fabrikasi. Pengambilan material yang tidak sesuai dengan spesifikasinya atau kegagalan dalam fabrikasi yang tidak saja disebabkan oleh faktor manusia (human error) akan tetapi lebih disebabkan oleh ketidak presisian peralatan maupun peralatan ukur yang digunakan dalam fabrikasi adalah menjadi
penyebab utama ketidak sesuaian antara hasil perhitungan dalam perencanaan dengan hasil aktual dilapangan.
Metoda yang dilakukan untuk pengukuran regangan pada load cell adalah sebagai berikut:
a. Load Cell hasil fabrikasi diletakan pada mesin tekan 980 kN, Tipe KP 100, Merk Bley Geratebau Eschwege.
Gambar Verifikasi Load Cell Hasil Fabrikasi
b. Hubungkan pengkondisi sinyal dengan kalibrator menggunakan kabel load cell.
Gambar Hubungan Pengkondisi Sinyal & Kalibrator
c. Sesuaikan penunjukan jumlah chanel, satuan beban dan regangan, tipe jembatan, k
factor strain gage dll pada pengkondisi sinyal.
d. Posisikan switch selector kalibrator pada 1 mv/v dan posisi 100 %. Penunjukan
harga pada pengkondisi sinyal harus sesuai dengan harga regangan yang terjadi
dengan system konfigurasi yang digunakan load cell yaitu:
Jika
Maka
Jika penunjukan tidak sesuai, maka program coefisient factor pada data pengkondisi
sinyal harus diubah.
e. Setelah prosedur 2 s/d 4 seslesai, selanjutnya kabel yang terhubung ke kalibrator
dilepas dan dihubungkan ke load cell hasil fabrikasi.
Gambar Hubungan Pengkondisi Sinyal & Load Cell Fabrikasi
f. Nol kan posisi pengkondisi sinyal untuk mendapatkan harga nol dari load cell, dan
pengukuran regangan siap dilaksanakan.
g. Berikan 3 (tiga) seri pembebanan tekan secara bertahap sedangka tiap seri
pembebanan terdiri dari 10 kN s/d 100 kN.
h. Untuk setiap tahap pembebanan hasilnya di catat sesuai dengan yang ditunjukan
pengkondisi sinyal. Hasil pengukuran ditunjukan pada Tabel 1.
Nilai regangan pada Tabel 1, adalah merupakan nilai yang sudah tidak lagi terpengaruh oleh adanya panas temperature kamar dan panjangnya kabel antara load cell dan peralatan pengkondisi sinyal, sehingga tidak perlu lagi dikoreksi perbedaan system kepekaan strain gage (gage factor) dan sistem alat, (device factor), oleh sebab koreksi kedua sistem tadi sudah dimasukan pada saat memprogram pengkondisi sinyal. Dari data hasil pengukuran regangan, untuk beban maksimum 100 kN adalah 669 μ. Sedangkan dari hasil perhitungan untuk beban 100 kN besarnya regangan adalah 765,838 μ. Disini terdapat selisih regangan sebesar 96,838 μ atau sekitar 12,64 %. Dari data hasil pengukuran untuk beban 100 kN tegangan yang terjadi pada load cell adalah:
σ = εE
σ = 210.103 N/mm2 669.10-6
σ = 140,49 N/mm2
Sedangkan dalam perhitungan desain tegangan yang terjadi adalah sebesar 160,82 N/mm2. Disini ada selisih tegangan sebesar 20,33 N/mm2. Dengan demikian dari hasil verifikasi didapat adanya ketidaksesuaian antara perhitungan desain dengan pengukuran beban aktual dilapangan. Kemungkinan penyebabnya adalah:
• Proses pembubutan dilakukan hanya dengan menggunakan mesin bubut
konvensional.
• Penempelan strain gage dilakukan hanya dengan menggunakan kekuatan
penekanan ibu jari.
KALIBRASI
Untuk dapat diaplikasikan sebagai sensor pada sistem uji, sensor hasil fabrikasi harus
dikalibrasi menggunakan peralatan kalibrasi yang tertelusur (traceable) ke standar
nasional maupun internasional.
Langkah-langkah kalibrasi:
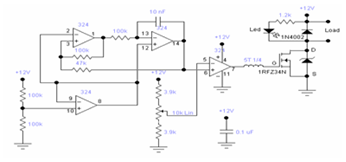
a. Buat rangkaian sistem kalibrasi sedemikian rupa sehingga keseluruhan gaya
aksial dapat diterima secara merata, seperti ditunjukan pada gambar berikut ini.
Gambar rangkaian system kalibrasi
b. Hidupkan tegangan listrik ±10 menit hingga penunjukan pengkondisi sinyal stabil.
c. Kalibrasi load cell standar dengan menggunakan kalibrator dengan susunan seperti
ditunjukan pada gambar berikut ini.
Gambar Rangkaian Kalibrasi Load Cell Standar Menggunakan Kalibrator
Oleh karena sensitivitas load cell standar 100 kN = 1,474 mv/v, Maka, Jika load cell diberi sinyal kalibrasi 1 mv/v, pengkondisi. sinyal harus menunjukan.
1/1,474 x 100kN = 67,84
Jika tidak, putar gain sampai pengkondisi sinyal menunjukan 67.84. Nolkan kalibrator, pengkondisi sinyal harus nol, jika tidak nolkan dan ulangi lagi hingga didapat harga yang diinginkan.
d. Hubungkan kabel pengkondisi sinyal ke load cell standar serta pengkondisi sinyal ke load cell hasil fabrikasi, seperti ditunjukan pada gambar berikut, kemudian keduanya di nolkan. (zero setting).
Gambar Rangkaian Kalibrasi Load Cell Fabrikasi
e. Lakukan pembebanan ±50% dari beba maksimal (50 kN). Penunjukan pada pengkondisi sinyal hasil fabrikasi harus 50,00 kN. Jika tidak putar gain sampai didapat harga 50,00 kN.
f. Nolkan beban sampai load cell standar menunjukan harga 0,00 pada pengkondisi sinyalnya. Saat beban nol, load cell hasil fabrikasi harus nol. JIka tidak, nolkan dan ulangi tahap pembebanan 50 % hingga didapat harga yang diinginkan.
g. Lakukan pemanasan 3 (tiga) kali dengan cara membebani load cell sampai kapasitas maksimumnya, sambil mengamati penunjukan load cell pada pengkondisi sinyal. Jika menyimpang ulangi poin 5 (lima).
h. Lakukan pembebanan tahap demi tahap sebanyak tiga seri pembebanan, dengan tiap seri terdiri dari 10 taha pembebanan.
i. Catat data hasil kalibrasi.
KESIMPULAN
Dari hasil rancang bangun diatas dapat disimpulkan bahwa :
1. Teknologi rancang bangun load cell sudah harus dikembangkan pada sector industri dalam negeri.
2. Untuk mengeleminir ketidaksesuaian antara perhitungan perencanaan dan aplikasi dilapangan pembuatan load cell harus dilakukan menggunakan mesin atau peralatan presisi tinggi (Computer Numerical Control).
BAB III
KESIMPULAN
Adapun kesimpulan yang dapat diambil dari karakteristik elastic sensing element beserta penggunaannya dalah sebagai berikut:
Sistem pengukuran menggunakan elastic sensing element disajikan dalam bentuk orde dua.
Model dinamik dari elastis element adalah: linear accelerometer, pressure sensor, Angular accelerometer, torque sensor.
Aplikasi dari elastis sensing element salah satunya adalah dalam load cell 9senor uji gaya)
Teknologi rancang bangun load cell sudah harus dikembangkan pada sector industri dalam negeri
Untuk dapat diaplikasikan di industri kalibrasi terhadap load cell harus dilakukan di Laboratorium Kalibrasi yang sudah terakreditasi, sehingga mendapatkan sertifikat kalibrasi sebagai legal formal terhadap penggunaan load cell tersebut.
Elastic sensing element memiliki keterkaitan dengan massa (inertance) dan redaman (resistensi) sebagaimana karakteristik pada suatu pegas.
DAFTAR PUSTAKA
Fraden Jacob (2003).”Handbook of ModernSensors: Third edition”.California:Springer
http:// budiarjo.wordpress.com , dikunjungi pada 2 November 2009 15:34
http://proinstrumentation.blospot.com, dikunjungi pada 2 November 2009 15:35
http:// bahtera.org, dikunjungi pada 30 November 2009 21:40
Kilian (2002).” Modern Control Technology: Components and System. Second edition”.England:Delmar
P.Bentley John (2005). “Principle of Measurement System: Fourth edition”.England: Pretince Hall.
P.Bentley John (2005). “Principle of Measurement System: Third edition”.England: Longman House.




.png)